射出成形機用ヴィックスサーボシステム サーボオイルポンプ


射出成形機の油圧システム

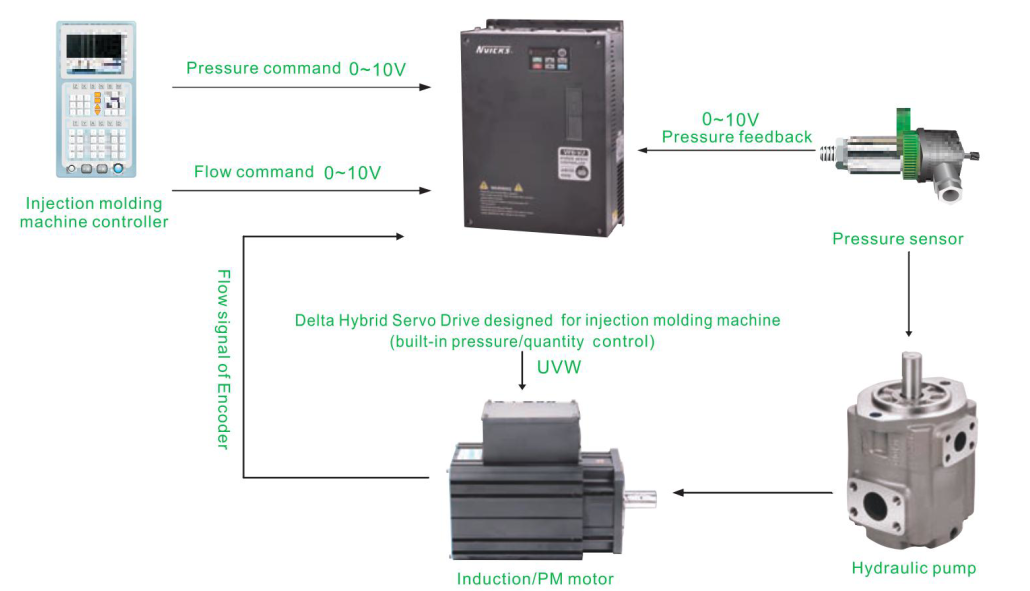
の構造油圧サーボシステム
射出成形機から圧力と流量の指令を取得し、実際の圧力と速度をフィードバックしたPID演算を行い、サーボモーターと油圧ポンプを高速応答かつ高い繰り返し精度で駆動します。

標準構成

オプションのアクセサリ

油圧エネルギーシステムの特長(5つの特長)



従来の射出成形機の主な消費電力
油圧システムを使用する場合、消費電力は噴射システム全体の 75% 以上になります。型閉じ、射出、保持圧力、型開きなどのプロセス中に、さまざまな圧力と流量が必要となります。流量と圧力の要件が設定を超えると、リリーフまたは比例バルブが調整され、消費電力が 40% ~ 75% 増加します。

上位 5 つの利点

使用法:

適切なハイブリッド エネルギー システムを選択する方法
(1) モーター出力の選択
● 必要トルク(N・m) T=q.Δp
2π・ηm
● 出力電力 (kw) P=2π・T·n = T · n =Q·Δp
60,000 9550 60・πη
q:cc/rev 変位(cm3) n:回転速度Δp:有効圧力差(Mpa)
Q: 必要流量 L/minηm:ポンプ機械効率 ηt:ポンプ総合効率
(2) 信号干渉の解決策
ドライブがコントロール パネルに設置されている場合、信号干渉に対する保護は次のとおりです。
● 主回路と制御回路の配線は別々にしてください。
● 必要に応じて適切に接地する
● 制御回路にはシールドケーブルを使用してください
● 主回路配線にはシールド線を使用してください。
(3) 適切なハイブリッド サーボ ドライブとモーターの選び方
実際のアプリケーションでは、オイルシステムの違いにより、ハイブリッドサーボドライブとモーターの選択が異なります。
次の例では、流量が 64L/min、最大流量が 64L/min です。保持圧力は17.5MPaを使用します。
● 油圧ポンプの容量:最大値から油圧ポンプの容量(cc/rev)を求めます。システム流量(L/min)
例: 最大値があると仮定します。システム流量は64L/分です。そして最大。モーター回転数は2000rpmです。油圧ポンプの容量は64/2000*1000=32cc/revとなります。
● 最大。モータートルク:最大値を取得します。最大トルクから油圧ポンプの圧力と容量
例: 最大値が次のとおりであると仮定します。圧力は17.5MPa、油圧ポンプの容量は32cc/revです。トルクは 17.5*32*1.3/(2p)=116Nm になります (係数はシステム全体の損失を補償するための 1.3 であり、必要に応じて 1.2 ~ 1.3 に変更できます)。
● 定格モータートルクと定格モーター出力:最大保持圧力に必要なトルクは次のとおりです。圧力はモータ定格トルクの 2 倍以下である必要があります (モータ工場から提供されたデータを最優先して使用してください)。この状況下で動作するモーターの温度は簡単に温度を超えてしまうためです。モータ定格トルク58N・mのとき、定格トルクの2倍、モータキャブ9.1kW*、定格回転数1500rpmを選択したとします。
*モーター出力の計算式:P(W)=T(Nm)Xw(rpmX2π/ 60)
●最大。モーター電流:
モータ仕様の係数kt(トルク/A)=3.31を得る場合、最大100mAとなります。最大電流時の電流は約 115/3.31=35A です。トルクは116N・mです。
● 適切なドライブを選択します。お客様の要件に応じて適切なドライブを選択してください。ドライブの過負荷能力が 60 秒間で 150%、3 秒間で 200% であると仮定します。保圧MAX時圧力 17.5 Mpa、32cc/rev 油圧ポンプ、必要なモーター電流は 35A です。
注意 適切なモーターがない場合は、次に高い出力のモーターを使用してください。
ハイブリッド サーボ ドライブまたは現在のシステムとの統合についてご質問がある場合は、デルタまでお問い合わせください。





